DH3-HV1700-B06 매니퓰레이터 포지셔너

그림
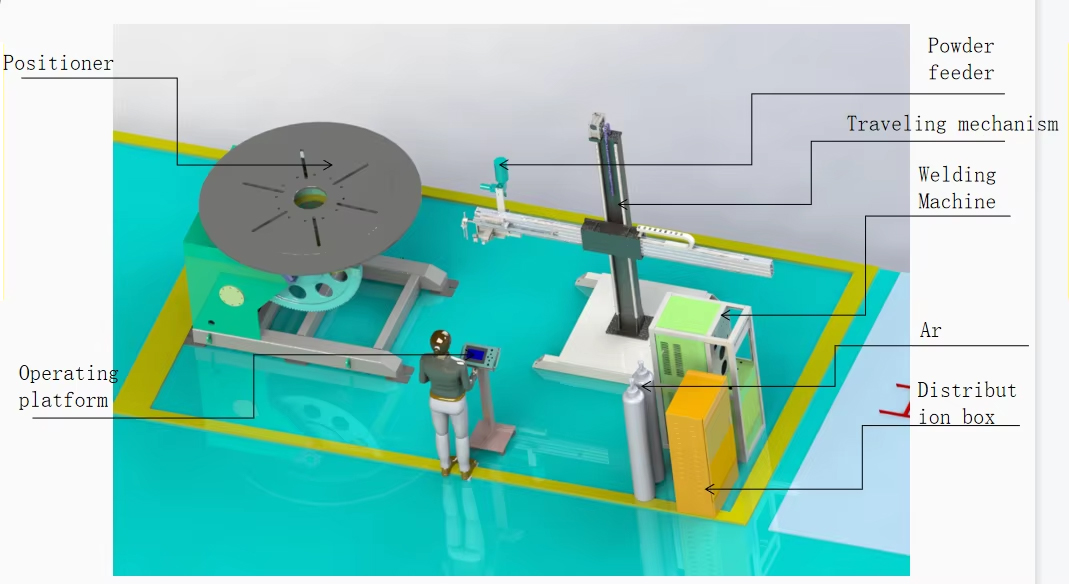
장비 특징
HV1700 용접 로봇 팔은 수입산 선형 가이드 레일, 정밀 웜 기어 감속기 및 스테핑 모터를 채택하여 구동되며, 작은 변속 간극, 높은 강성, 안정적이고 신뢰할 수 있는 작동 및 편리한 통합을 제공합니다.
HBT-3 관통형 용접 포지셔너는 독특한 중앙 관통형 설계와 수동식 회전 포지셔너를 갖추고 있어 다양한 초장축 부품의 내외면 겹침 용접에 적합합니다. 서보 모터 구동 선회 베어링을 장착하여 스핀들의 정밀한 구동을 구현하고, 유격이 작고 회전 정밀도가 높으며 제어가 편리합니다.
적용 가능한 제품
이 시스템은 PLC 제어, 사용자 친화적인 인터페이스, 간편한 조작을 특징으로 합니다. 모든 종류의 원형 축 제품 및 디스크형 제품의 자동 표면 가공에 사용할 수 있으며, 매개변수 입력만으로 원터치 조작이 가능하고 용접기 매개변수, 이동 매개변수 등이 통합되어 있습니다. 작업자는 간단한 조작으로 쉽게 시작할 수 있으며, 높은 수준의 전문 지식이 필요하지 않습니다.
합금 분말은 분말 공급 장치를 통해 PTA 용접 토치로 지속적으로 공급되며, 분말 공급 가스 흐름을 이용하여 아크에 분사됩니다. 이 과정에서 용융 또는 반용융 상태의 플라즈마 분말은 아크 기둥에서 예열된 후, 용융된 공작물 풀에 분사되어 완전히 용융되고 가스와 슬래그를 배출합니다.


여기에 메시지를 작성하여 보내주세요.





